|
I'm a Research Scientist at NVIDIA, working at the intersection of Computer Vision, Graphics, and AI with a focus on building lifelike robots. My past research spans 3D reconstruction and rendering, human pose estimation, generative models, SLAM, and telepresence systems. During my Ph.D. study on telepresence systems at the University of North Carolina at Chapel Hill, I was fortunate to have been advised by professor Henry Fuchs. Before that, I worked with professor Derek Hoiem at his startup Reconstruct. I obtained my Master of Science in Computer Vision (MSCV) from Carnegie Mellon University, where I worked with professor Michael Kaess on SLAM systems. I obtained my Bachelor of Science in Computer Engineering from University of Illinois at Urbana Champaign. shengzew [at] cs.unc.edu / Google Scholar / Twitter / My Music (Soundcloud) / 网易云 |

|
|
|
|
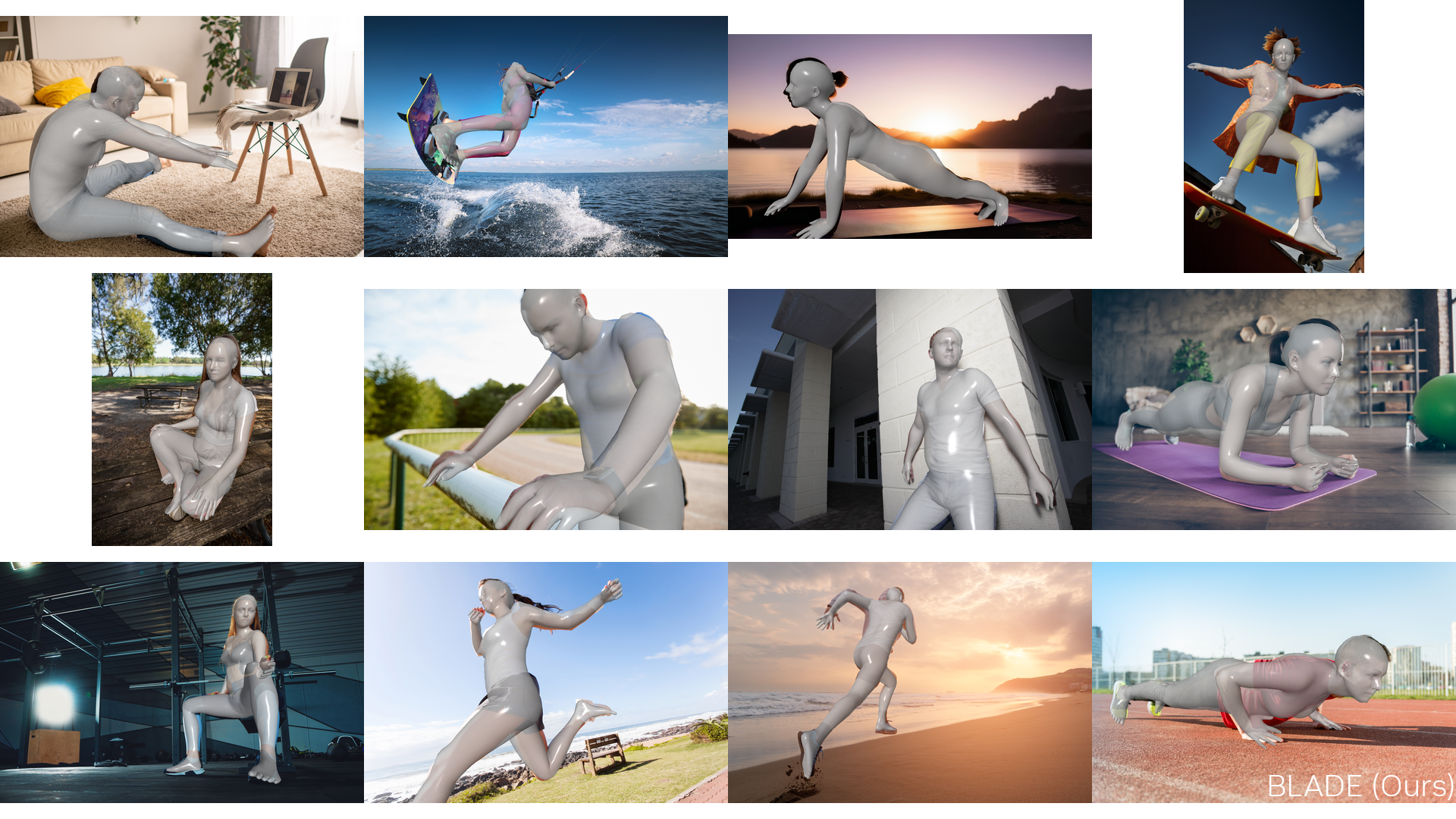
Shengze Wang, Jiefeng Li, Tianye Li, Ye Yuan, Henry Fuchs, Koki Nagano*, Shalini De Mello*, Michael Stengel* CVPR, 2025 [Project Page] [CVPR] [Code] [Weights & File Preparation] Single-image human mesh recovery that accurately estimates perspective parameters (including Tz and focal length) from a single image, delivering SOTA pose accuracy and 2D alignment—especially for close-range views. |
|
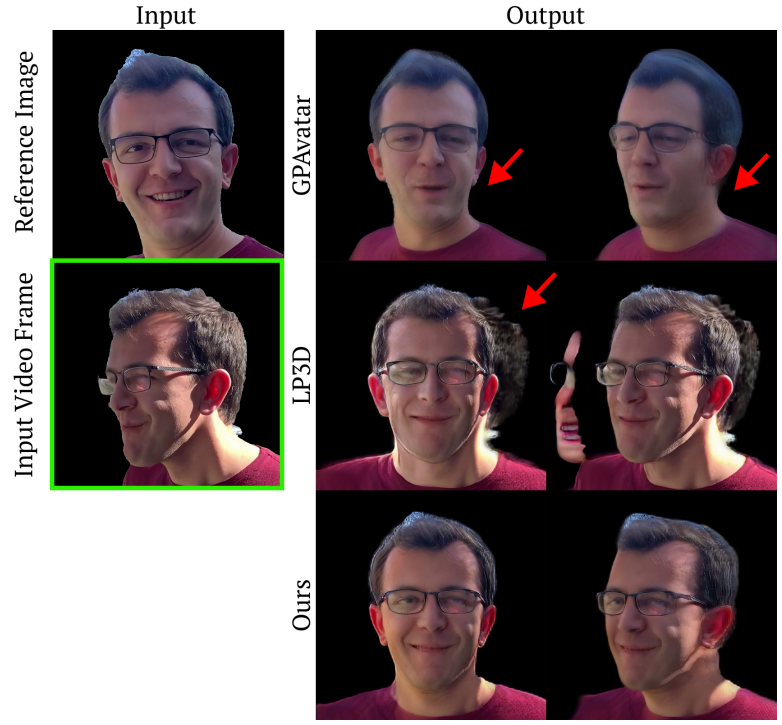
Shengze Wang, Xueting Li, Chao Liu, Matthew Chan, Michael Stengel, Henry Fuchs, Shalini De Mello*, Koki Nagano*, CVPR, 2025 [Project Page] [CVPR] Fusion-based 3D portrait method that combines a canonical 3D prior with per-frame appearance to achieve temporally stable, identity-consistent 3D videos for single-camera telepresence. |
|
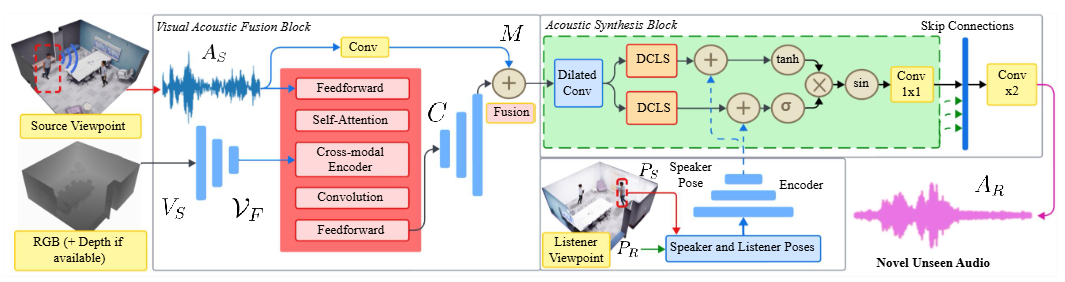
Guansen Tong, Johnathan Chi-Ho Leung, Xi Peng, Haosheng Shi, Liujie Zheng, Shengze Wang, Arryn Carlos O’Brien, Ashley Paula-Ann Neall, Grace Fei, Martim Gaspar, Praneeth Chakravarthula IEEE TVCG, 2025 [TVCG] Visual-acoustic fusion (“conformer”) + acoustic synthesis to learn scene acoustics and render spatial audio from novel viewpoints; improves immersive MR audio quality. |
|
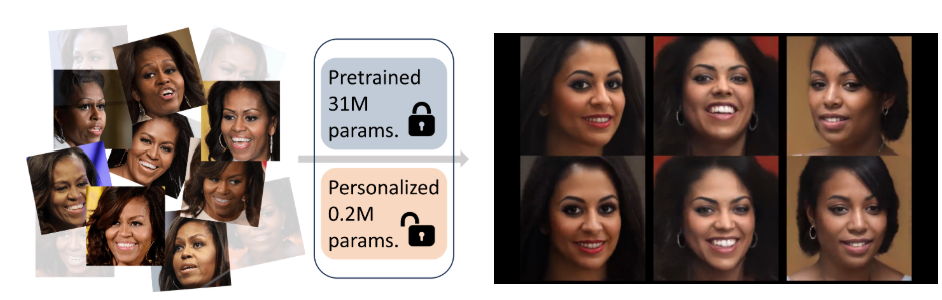
Luchao Qi, Jiaye Wu, Annie N. Wang, Shengze Wang, Roni Sengupta WACV, 2025 [Project Page] [arXiv] Personalized 3D prior of an individual using as few as 50 training images. My3DGen allows for novel view synthesis, semantic editing of a given face (e.g. adding a smile), and synthesizing novel appearances, all while preserving the original person's identity. |
|
Shengze Wang, Ziheng Wang, Ryan Schmelzle, Liuejie Zheng, YoungJoong Kwon, Roni Sengupta, Henry Fuchs IEEE TVCG, 2025 [Project Page] [arXiv] Journal version of your affordable desktop telepresence system (Bringing Telepresence to Every Desk, 2023): 4 consumer RGB-D cameras and a renderer that synthesizes high-quality free-viewpoint videos of both user and environment. |
|

|
Michael Stengel, Koki Nagano, Chao Liu, Matthew Chan, Alex Trevithick, Shalini De Mello, Jonghyun Kim, David Luebke, Amrita Mazumdar, Shengze Wang Mayoore Jaiswal SIGGRAPH Emerging Technologies, 2023 [Project Page] [NVIDIA YouTube] [ACM DL] We present an AI-mediated 3D video conferencing system that can reconstruct and autostereoscopically display a life-sized talking head using consumer-grade compute resources and minimal capture equipment. Our 3D capture uses a novel 3D lifting method that encodes a given 2D input into an efficient triplanar neural representation of the user, which can be rendered from novel viewpoints in real-time. Our AI-based techniques drastically reduce the cost for 3D capture, while providing a high-fidelity 3D representation on the receiver's end at the cost of traditional 2D video streaming. Additional advantages of our AI-based approach include the ability to accommodate both photorealistic and stylized avatars, and the ability to enable mutual eye contact in multi-directional video conferencing. We demonstrate our system using a tracked stereo display for a personal viewing experience as well as a light field display for a multi-viewer experience. |
|
Shengze Wang, Ziheng Wang, Ryan Schmelzle, Liuejie Zheng, YoungJoong Kwon, Roni Sengupta, Henry Fuchs arXiv, 2023 [Project Page][Code] We showcase a prototype personal telepresence system. With 4 RGBD cameras, it can be easily installed on every desk. Our renderer synthesizes high-quality free-viewpoint videos of the entire scene and outperforms prior neural rendering methods. |
|
|
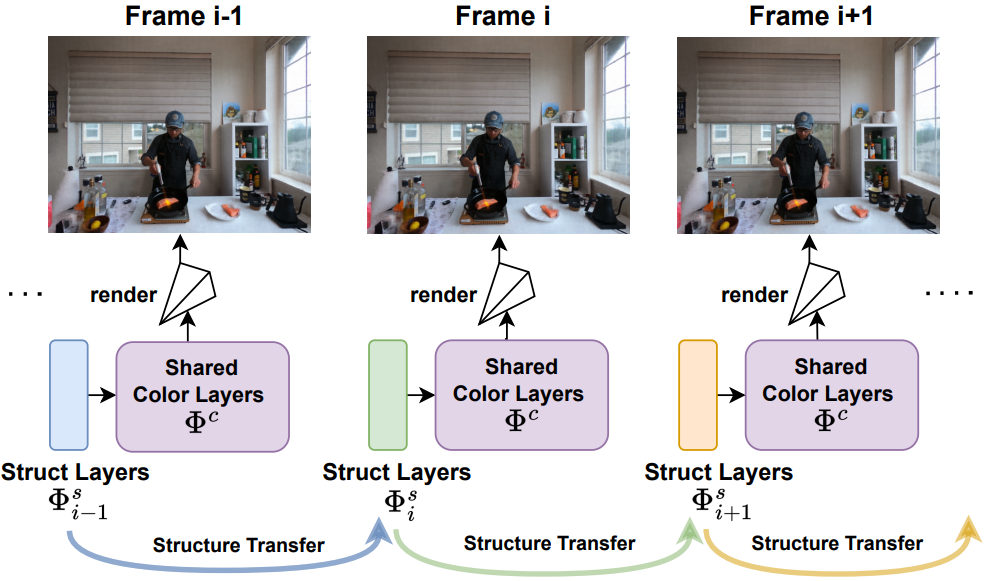
Shengze Wang, Alexey Supikov, Joshua Ratcliff, Henry Fuchs, Ronald Azuma arXiv, 2023 We discovered a natural information partition in 2D/3D MLPs, which stores structural information in early layers and color information in later layers. We leverage this property to incrementally stream dynamic free-viewpoint videos without buffering (required by prior dynamic NeRFs). With the significant reduction in training time and bandwidth, we lay foundation for live-streaming NeRF and better understanding of MLPs. |
|
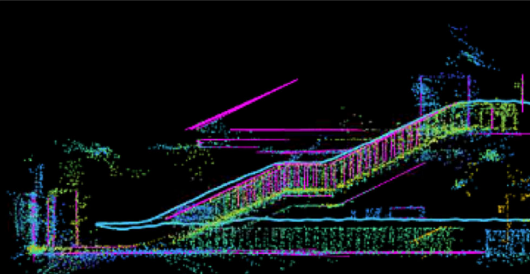
Lipu Zhou, Guoquan Huang, Yinian Mao, Jincheng Yu, Shengze Wang, Michael Kaess IEEE RA-L, 2022 |
|
Lipu Zhou, Guoquan Huang, Yinian Mao, Shengze Wang, Michael Kaess ICRA, 2022 |
|
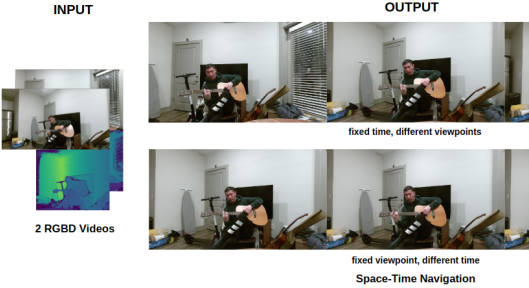
Shengze Wang, YoungJoong Kwon, Yuan Shen, Qian Zhang, Andrei State, Jia-Bin Huang, Henry Fuchs arXiv, 2022 We introduce a system that synthesizes dynamic free-viewpoint videos from 2 RGBD cameras. This is a preliminary work to our personal telepresence system. |
|
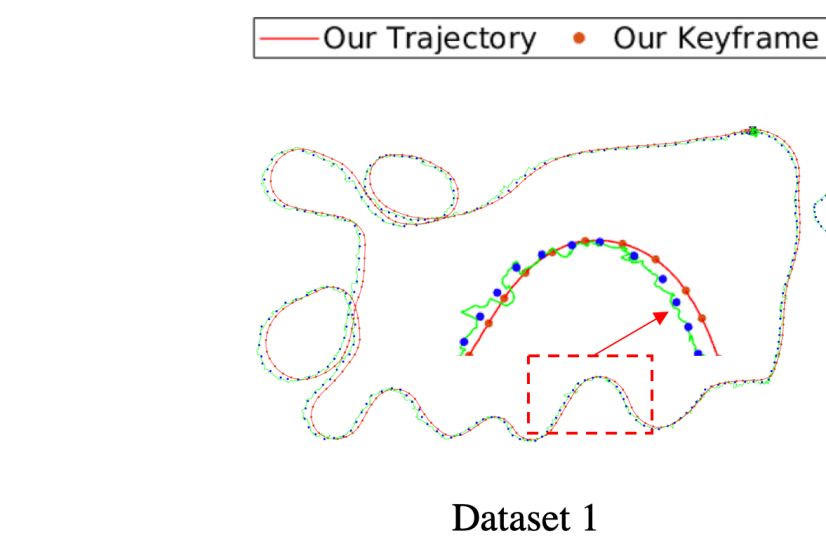
Lipu Zhou, Shengze Wang, Michael Kaess ICRA, 2021 |
|
Lipu Zhou, Shengze Wang, Michael Kaess ICRA, 2021 |
|
|
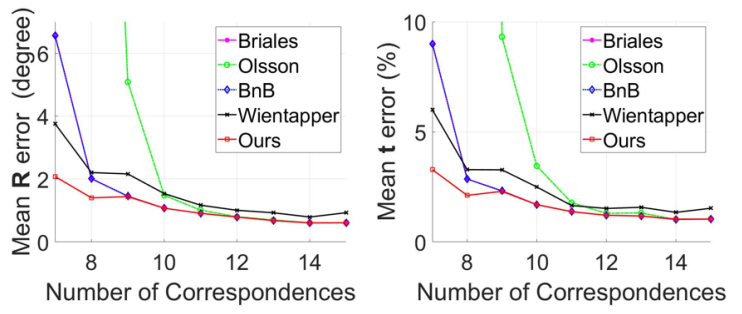
Lipu Zhou, Shengze Wang, Michael Kaess ICRA, 2020 |
|
Lipu Zhou, Shengze Wang, Jiamin Ye, Michael Kaess arXiv, 2019 |
|
Lipu Zhou, Jiamin Ye, Montiel Abello, Shengze Wang, Michael Kaess arXiv, 2018 |
|
Thank you to Jon Barron for sharing his website template with the community |